Home exam in advanced topics in Computer Graphics
Three
questions:
Q1:
A surface can be represented by a small number of “characteristic” features. A
“characteristic” feature, denoted by c-feature, is a point on the surface and
its associated quadratic polynomial that locally fits the surface.
A quadratic surface can be represented by (v^t)*M*v +
2*(b^t)v + c = 0, where v =
(x, y, z) is the coordinates vector, M is a 3x3 symmetric matrix, b is a
3-vector and c is a nonnegative constant. The coordinates (x,y,z) can be changed to some local frame (local to
the characteristic point), so that there is no b^t in
the representation. M can be decomposed into U*C*(U^t),
where U is an orthogonal matrix (some rotation) and C a diagonal matrix.
Now, two c-features represent locally “similar” surfaces, if their
corresponding C matrices are almost similar (one is approximately a scaling of
the other). The two c-features represent locally about the same surface (up to
rotation) if their C matrices are about the same.
1. Develop this idea and show how to search for a similar piece of surface,
given some surface patch.
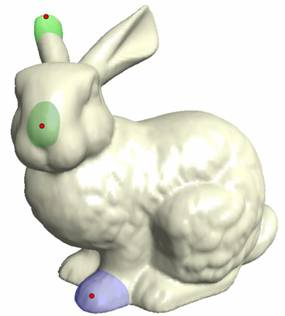
2. Show how to generate a small but efficient number of c-features for a given
3D mesh (think, for example, about the Stanford bunny). In particular, show
where the c-features should be located, how to define them and how to define
their number.
Q2.
In the following question you should refer to these papers:
"A Model of Visual Masking for Computer Graphics"
James A. Ferwerda, Sumanta
N. Pattanaik, Peter Shirley, Donald P. Greenberg.
http://www.cs.ucf.edu/~sumant/publications/sig97.pdf
"Using Perceptual Texture Masking for Efficient Image Synthesis"
Bruce Walter, Sumanta N. Pattanaik,
Donald P. Greenberg.
http://www.cs.ucf.edu/~sumant/publications/EG2002.pdf
"Visibility Culling using Hierarchical Occlusion Maps"
Hansong Zhang, Dinesh Manocha, Tom Hudson, Kenneth E. Hoff III.
Search in: www.acm.org/dl proceedings
siggraph97
You may also refer to other papers that you think are relevant.
1. Define visual masking. Explain the main ideas behind visual masking.
2. Define aggressive visibility culling, and explain the main idea.
3. Suggest a method to combine visual masking and aggressive visibility culling
for visibility computations. Explain why the combination of these techniques
will be beneficial for outdoor models where there are no large occluders.
Describe, in details, how the suggested method work can work in real-time.
Q3.
Among the various topics that we covered in the course, which one seems to you
the most interesting/challenging to you? Explain why?